
九州大学 大学院システム情報科学研究院 情報知能工学部門 イメージ・メディア理解研究室
研究紹介RESEACH
映像サーベイランス
センシング情報のオープン化
道路や街中・建物内などに様々なセンサが設置されるようになりました.それらのセンサ情報を様々なアプリケーションに役立てるため,我々は「センシング情報のオープン化」に取り組んでいます.現在,それぞれのセンサは独立に稼働していますが,それらをネットワークで結びつけることで,様々なセンサから得られる情報を組み合わせることが可能となり,人にとってさらに有益な情報を生み出すことができます.

国際会議 (査読有)
- Rin-ichiro Taniguchi, Atsushi Shimada, Yuji Kawaguchi, Yousuke Miyata, Satoshi Yoshinaga
Structuring and Presenting the Distributed Sensory Information in the Sensing Web
Information Processing and Management of Uncertainty in Knowledge-Based Systems. Applications, Vol.8, pp.643-652, 2010.06
BibTeX
人物照合
商業施設や街中といったカメラが分散配置された環境において,個々のカメラで観測された人物が同一人物であるかを判定する研究を行っています.本研究では,照合対象となる人物領域のみに着目するのではなく,各カメラで同時に観測された人物の特徴を考慮することで,照合精度の向上を検討しています.
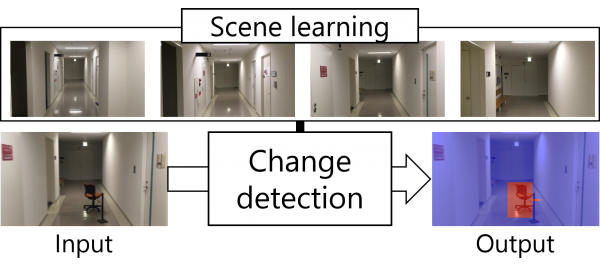
移動カメラを用いた変化検出
車載カメラのように移動することを前提としたカメラで観察される映像内で生じた変化を検出する研究を行っています.変化をとらえる方法として,同じ領域を撮影した過去の映像を現在の映像を比較することで検出できます.カメラが移動する場合には,各撮影位置で観測された過去の映像を記憶し,モデル化しておく必要があります.私たちは,効率的に過去の情報をモデル化する方法や高精度に変化を検出する手法を提案しています.
論文誌 (査読有)
- Tsubasa Minematsu, Atsushi Shimada, Hideaki Uchiyama, Vincent Charvillat, Rin-ichiro Taniguchi
Reconstruction-Based Change Detection with Image Completion for a Free-Moving Camera
Sensors, Vol.18, No.4, p.1232, 2018.04
BibTeX, doi - Tsubasa Minematsu, Hideaki Uchiyama, Atsushi Shimada, Hajime Nagahara, Rin-ichiro Taniguchi
Adaptive background model registration for moving cameras
Pattern Recognition Letters, 2017.03
BibTeX, doi