
九州大学 大学院システム情報科学研究院 情報知能工学部門 イメージ・メディア理解研究室
研究紹介RESEACH
ロボットビジョン
位置姿勢推定
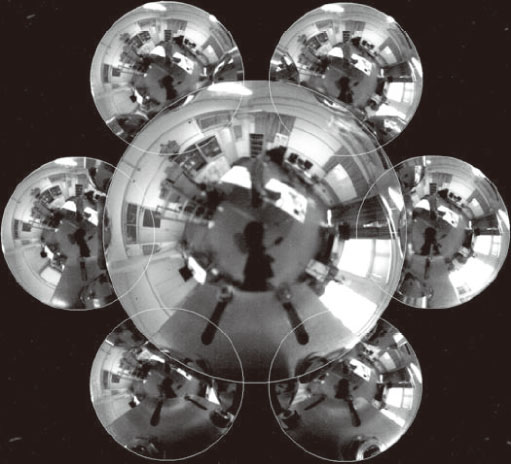
カメラから得られた画像の動きには,カメラ自身の動きの情報が含まれています.例えば,カメラが平行運動や回転運動をすると,撮影画像中のシーンにはその動きが反対方向の動きの変化として現れます.つまり,動画像中からシーンの動きを解析する事で,カメラやそれを搭載したロボット自身の動きを推定することができます.一般的なカメラでは,視野角が狭いことから平行運動と回転運動の変化が分かりにくいという問題がありました.
我々は,広視野角の撮影が可能な全方位カメラを用いることで,平行運動と回転運動の分離を含む安定したカメラ運動の推定手法を研究しています.また,全方位ステレオ計測が可能な全方位カメラを用いて,物体の奥行きを得ることで,平行運動と回転運動の分離を容易に行う姿勢推定手法についても研究を行っています.
我々は,広視野角の撮影が可能な全方位カメラを用いることで,平行運動と回転運動の分離を含む安定したカメラ運動の推定手法を研究しています.また,全方位ステレオ計測が可能な全方位カメラを用いて,物体の奥行きを得ることで,平行運動と回転運動の分離を容易に行う姿勢推定手法についても研究を行っています.
論文誌 (査読有)
- Trung Thanh Ngo, Yuichiro Kojima, Hajime Nagahara, Ryusuke Sagawa, Yasuhiro Mukaigawa, Masahiko Yachida, Yasushi Yagi
Real-time Estimation of Fast Egomotion with Feature Classification using Compound Omnidirectional Vision Sensor
IEICE Transaction on Information and Systems, Vol.E93-D, No.1, pp.152-166, 2010.01
BibTeX
国際会議 (査読有)
- Trung Ngo Thanh, Hajime Nagahara, Ryusuke Sagawa, Yasuhiro Mukaigawa, Masahiko Yachida, Yasushi Yagi
Robust and Real-Time Egomotion Estimation Using a Compound Omnidirectional Sensor
Proc. IEEE Int. Conf. Robotics and Automation, pp.492-497, 2008.03
BibTeX - Trung Thanh Ngo, Hajime Nagahara, Ryusuke Sagawa, Yasuhiro Mukaigawa, Masahiko Yachida, Yasushi Yagi
Robust and Real-time Rotation Estimation of Compound Omnidirectional Sensor
Proc. IEEE Int. Conf. Robotics and Automation, pp.4226-4231, 2007.04
BibTeX
国内学会 (査読無し)
- 松井良平, 長原一, 谷内田正彦
GPUを用いた全方位画像処理の高速化
画像の認識・理解シンポジウム, No.IS4-170, pp.1539-1546, 2005.07
BibTeX
自己位置と環境の同時推定
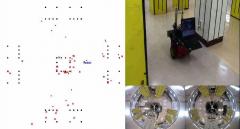
ロボットが人や動物の様に,未知環境において自律移動を行うには外界情報の獲得とロボット自身の位置を同時に把握する必要があります.そのため,従来よりロボットの自己位置推定と環境マッピングを同時に行うSimultaneous Localization and Mapping(SLAM)の研究が盛んに行われてきました.カメラなどの視覚センサを用いたVisual SLAMには,両眼カメラと単眼カメラを用いた手法が提案されています.両眼手法と単眼手法では,それぞれステレオマッチングの問題の解決やスケールファクタの欠如など一長一短があり,どちらも完全な手法ではありませんでした.
この研究では,単眼推定と両眼推定それぞれの長所を組み合せた新しい両眼・単眼ハイブリットのSLAM手法について研究しています.具体的には,環境中の各ランドマークに対して,推定状態により適宜両眼・単眼推定器を切り替えることで,精度の高い自己位置推定と密な環境マップの生成を実現する手法を提案しています.
この研究では,単眼推定と両眼推定それぞれの長所を組み合せた新しい両眼・単眼ハイブリットのSLAM手法について研究しています.具体的には,環境中の各ランドマークに対して,推定状態により適宜両眼・単眼推定器を切り替えることで,精度の高い自己位置推定と密な環境マップの生成を実現する手法を提案しています.
論文誌 (査読有)
- 坂口雄介, Ngo Thanh Trung, 長原一, 谷内田正彦
単眼・両眼推定器を複合した自己位置と環境の同時推定
情報科学技術レターズ, pp.207-210, 2006.09
BibTeX
国際会議 (査読有)
- Trung Ngo Thanh, Yusuke Sakaguchi, Hajime Nagahara, Masahiko Yachida
Stereo SLAM Using Two Estimators
Proc. IEEE Int. Conf. Robotics and Biomimetics, No.M1-1, pp.19-24, 2006.11
BibTeX
国内学会 (査読無し)
- 古森 崇史, 長原 一, 島田 敬士, 谷口 倫一郎
単眼・両眼を相補的に用いたSLAM
火の国情報シンポジウム, 2011.03
BibTeX