
九州大学 大学院システム情報科学研究院 情報知能工学部門 イメージ・メディア理解研究室
研究紹介RESEACH
映像サーベイランス
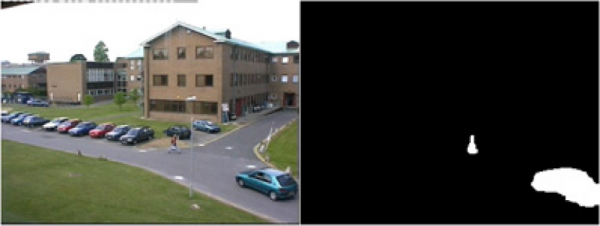
照明変動に頑健な物体検出
背景をモデル化することで,カメラで観察する映像内から移動物体のみを検出する研究を進めています.木々や水面の揺らぎを確率モデルで近似したり,局所領域のテクスチャの一様性を考慮することで天候等の影響による明るさ変化を無効化したりすることで,ノイズや背景変動に頑健な移動物体の検出手法を提案しています.
また,シーン変動のモデル化とシーン変動時における最適なモデルの選択方法を組み合わせることで,従来法よりも低コスト且つ高性能な検出法についても研究しています.
また,シーン変動のモデル化とシーン変動時における最適なモデルの選択方法を組み合わせることで,従来法よりも低コスト且つ高性能な検出法についても研究しています.
論文誌 (査読有)
- Satoshi Yoshinaga, Atsushi Shimada, Hajime Nagahara, Rin-ichiro Taniguchi
Statistical Local Difference Pattern for Background Modeling
IPSJ Transactions on Computer Vision and Applications, Vol.3, pp.198-210, 2011.12
BibTeX - Atsushi Shimada, Satoshi Yoshinaga, Rin-ichiro Taniguchi
Maintenance of Blind Background Model for Robust Object Detection
IPSJ Transactions on Computer Vision and Applications, Vol.3, pp.148-159, 2011.12
BibTeX
広域移動物体追跡
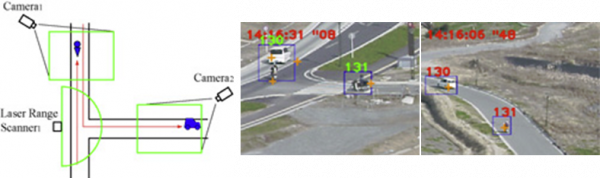
商業施設や街中といったセンサが分散配置された環境において,個々のセンサにおける移動物体の追跡情報からセンサ間の連結関係を自動推定することで,広域環境において移動物体を追跡する研究を行っています.
広域になるとセンサ数と同様にそれらを解析する計算機の数も増えるため,負荷分散や追跡精度の向上の観点から各計算機に対するセンサの最適な割り当てを自動で推定する手法についても研究を進めています.
広域になるとセンサ数と同様にそれらを解析する計算機の数も増えるため,負荷分散や追跡精度の向上の観点から各計算機に対するセンサの最適な割り当てを自動で推定する手法についても研究を進めています.
国際会議 (査読有)
- Shuhei Noda, Atsushi Shimada, Daisaku Arita, Rin-ichiro Taniguchi
Object Tracking across Non-overlapping Views of Multiple Sensors
Proc. of International Workshop on "Sensing Web" in conjunction with the 19th International Conference on Pattern Recognition (ICPR2008), 2008.12
BibTeX